4/20/23
AIM
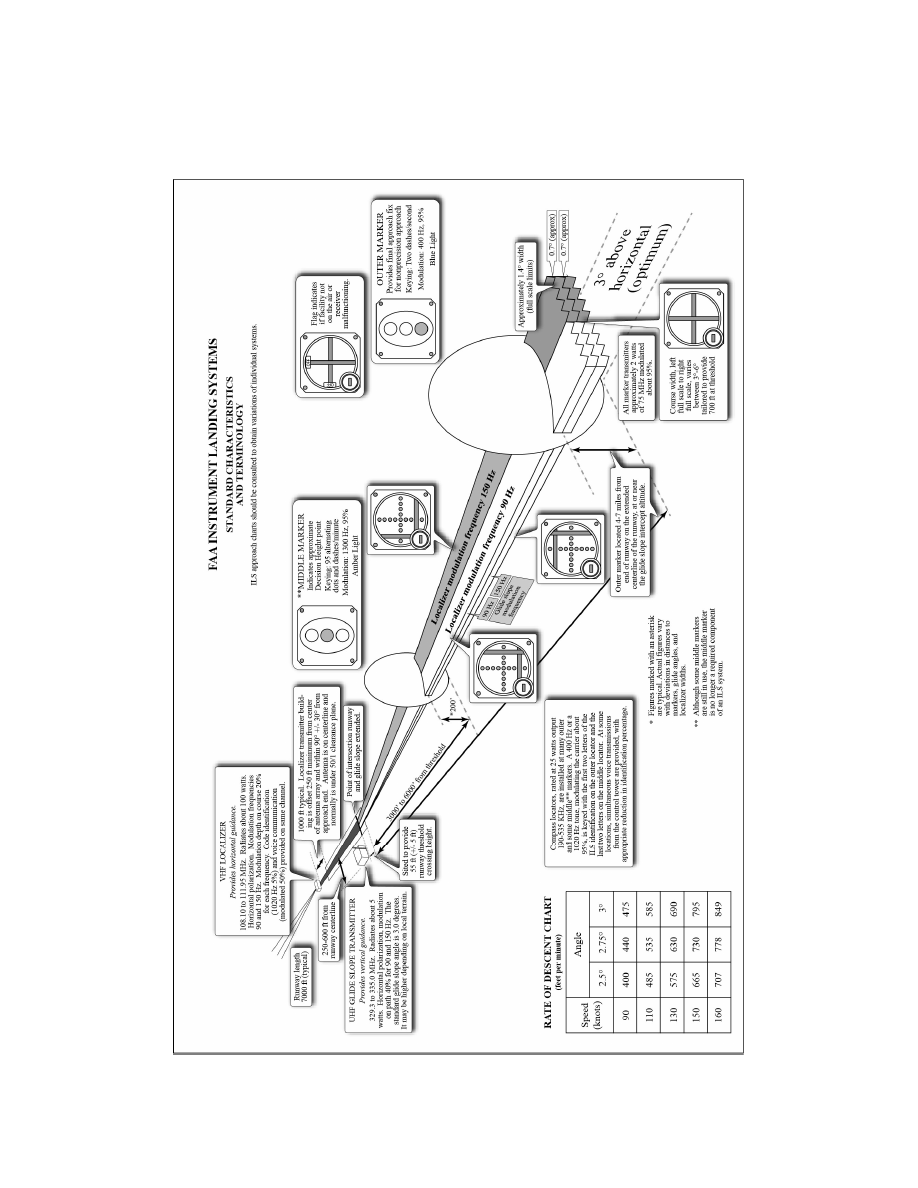
FIG 1
−
1
−
8
FAA Instrument Landing Systems
Navigation Aids
1
−
1
−
19