AIM
4/20/23
1
−
2
−
3
Performance
−
Based Navigation (PBN) and Area Navigation (RNAV)
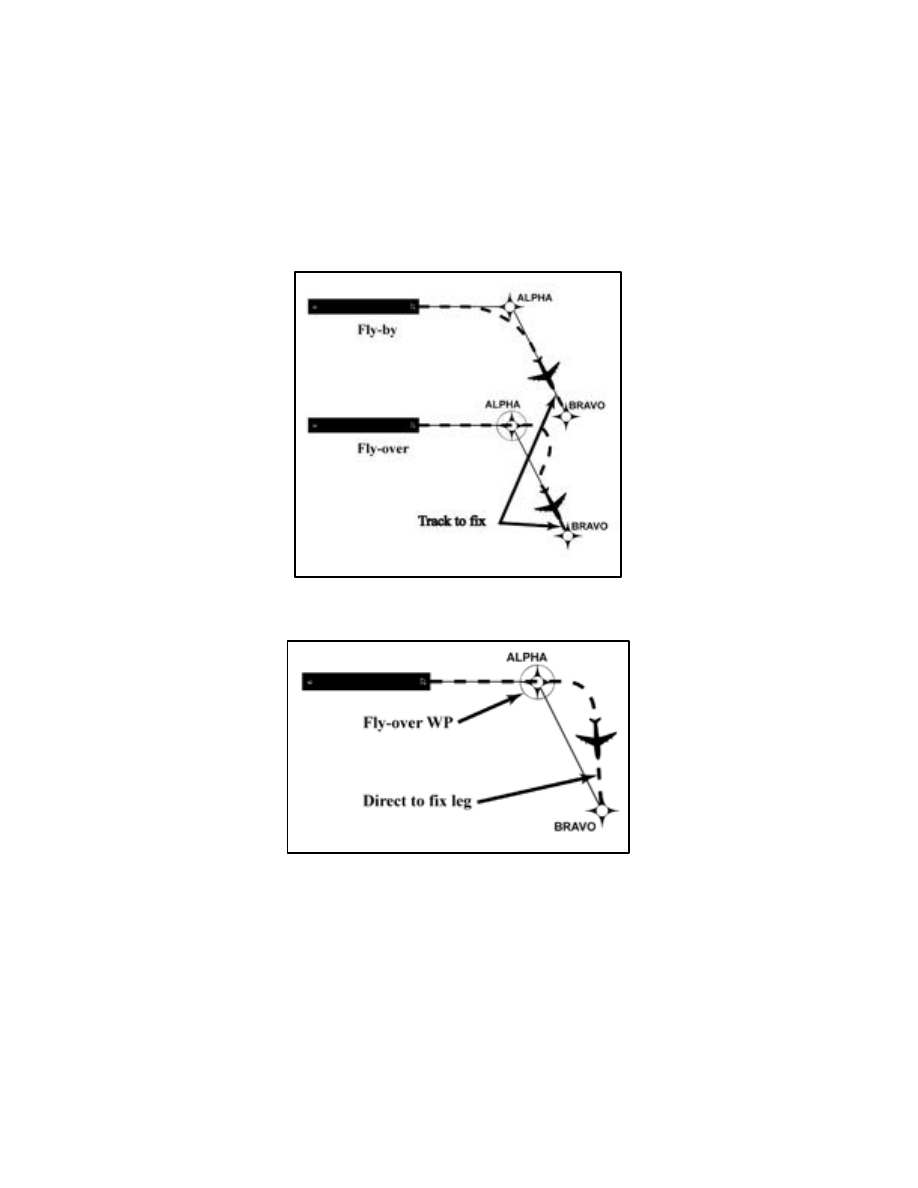
(1) Track to Fix.
A Track to Fix (TF) leg is intercepted and acquired as the flight track to the following
waypoint. Track to a Fix legs are sometimes called point
−
to
−
point legs for this reason.
Narrative:
“direct
ALPHA, then on course to BRAVO WP.”
See FIG 1
−
2
−
3.
(2) Direct to Fix.
A Direct to Fix (DF) leg is a path described by an aircraft’s track from an initial area
direct to the next waypoint.
Narrative:
“turn right direct BRAVO WP.”
See FIG 1
−
2
−
4.
FIG 1
−
2
−
3
Track to Fix Leg Type
FIG 1
−
2
−
4
Direct to Fix Leg Type
(3) Course to Fix.
A Course to Fix (CF) leg is a path that terminates at a fix with a specified course
at that fix.
Narrative:
“on course 150 to ALPHA WP.”
See FIG 1
−
2
−
5.